Mikrokomputery jednoukładowe 8020 i 8021 różniš się między sobš przede wszystkim wielkociš obudowy. Układ 8020 jest wytwarzany w obudowie 20-końcowej, a układ 8021 - w 28-końcowej. Układ 8020 ma więc mniejszš liczbę linii wejcia- wyjcia.
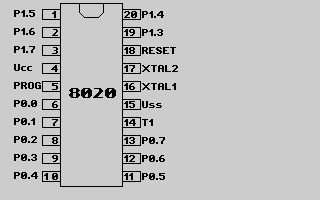
Mikrokomputer 8020
Funkcje sygnałów sš następujšce:
P00 - P07 - (port 0) - 8-bitowy port we-wy;
P13 - P17 - (port 1 - układ 8020) - 5-bitowy port we-wy;
P10 - P17 - (port1 - układ 8021) - 8-bitowy port we-wy;
P20 - P23 - (port 2 - układ 8021) - 4-bitowy port we-wy,
pełnišcy funkcję 4-bitowej magistrali przy
współpracy z ekspanderem 8243;
PROG - wyjcie sygnału sterujšcego do współpracy z
ekspanderem 8243 (tylko w układzie 8021),
używane przy odczytywaniu wewnętrznej pamięci
programu;
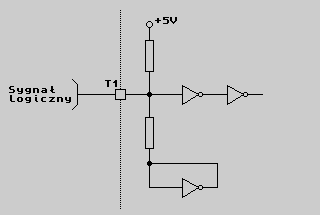
T1 (Test 1) - wejcie pracujšce jako detektor przejcia przez
0V napięcia zewnętrznego sygnału
wolnozmiennego; jest to, opcjonalnie, wejcie
sygnału logicznego; stan wejcia może być
testowany za pomocš rozkazów skoków
warunkowych JT1 i JNT1; po wykonaniu rozkazu
STRT CNT - wejcie sygnału zegarowego dla
układu czasowo-licznikowego;
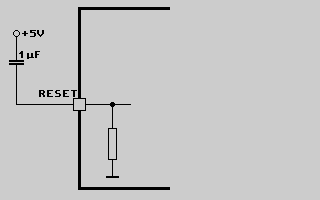
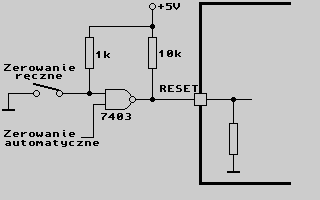
RESET - wejcie zerujšce, aktywny poziom wysoki;
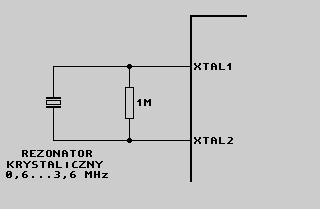
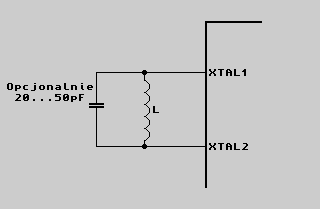
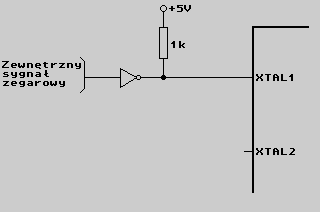
XTAL1 - pierwsza końcówka do dołšczenia rezonatora zewnętrznego;
wejcie zewnętrznego sygnału zegarowego;
XTAL2 - druga końcówka do dołšczenia rezonatora zewnętrznego;
ALE - wyjcie sygnału zegarowego, wyznaczajšcego cykle maszynowe
o częstotliwoci fxtal /30;
Ucc - zasilanie (+ 5,5 V +- 1 V);
Uss - masa (0 V).
Jednostka arytmetyczno-logiczna, rejestry użytkowe
Pamięć programu, licznik rozkazów
Pamięć danych, stos
63 +-----------------+
.. | |
.. | |
.. | Pamięć |
.. | użytkownika |
.. | |
24 | |
+-----------------+
23 | 8-poziomowy |
.. | stos |
.. | lub |
.. | pamięć |
8 | użytkownika |
+-----------------+
7 | R7 | \
+-----------------+ |
| R6 | |
+-----------------+ |
| R5 | |
+-----------------+ | Zbiór rejetrów
| R4 | \
+-----------------+ / roboczych
| R3 | |
+-----------------+ |
| R2 | |
+-----------------+ |
| R1 | |
+-----------------+ |
0 | R0 | /
+-----------------+
Pierwszych osiem słów pamięci (o adresach 0-7) stanowi zbiór
(jedyny) uniwersalnych rejestrów roboczych R0...R7. Słowa te mogš być adresowane
bezporednio, a cała pamięć - porednio, poprzez rejestry R0 i R1.
Częć pamięci o adresach od 8 do 23 to 8-poziomowy stos adresowany przez 3-bitowy wskanik stosu SP. Wskanik stosu jest zerowany w czasie inicjowania systemu, zwiększany o 1 przy zapisywaniu na stosie, a zmniejszany o 1 przy odczytywaniu ze stosu. Nie może on być programowo zmieniany ani odczytywany. Przy skoku do podprogramu na stosie zapisuje się wyłšcznie stan licznika rozkazów (nie ma słowa stanu). Poza tymi różnicami organizacja i wykorzystanie stosu sš podobne, jak w układzie 8048 (patrz punkt 2.3).
Nie ma możliwoci dołšczania zewnętrznej pamięci danych.
Wejcie-wyjcie
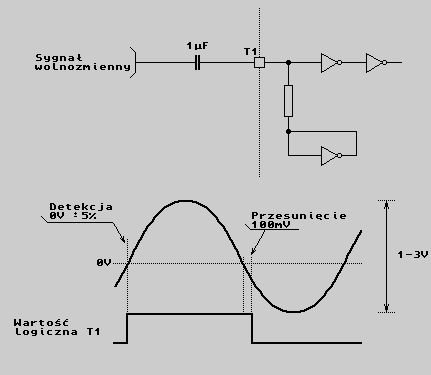
Wejcie T1
Wejcie T1 mikrokomputerów 8020/21 ma
specjalnš budowę, umożliwiajšcš wykorzystanie go jako detektora przejcia przez
0 V (ang. zero-cross detector) napięcia sygnału wolnozmiennego, dołšczonego
poprzez kondensator o pojemnoci 1 uF rys.
Rozbudowa wejcia-wyjcia
Nie jest możliwe dołšczanie do
mikrokomputera 8020 zewnętrznych układów wejcia-wyjcia.
Mikrokomputer 8021 może natomiast współpracować z układem ekspandera 8243.
Sposoby dołšczania ekspandera i komunikacji z nim sš takie same, jak dla układu
8048.
UkŁad czasowo-licznikowy
Podstawowe parametry czasowe układu czasowo-licznikowego, przy
częstotliwoci sygnału zegarowego 3 MHz (cykl rozkazowy 10ms), sš następujšce:
- okres zegara taktujšcego licznik w trybie czasomierza - Tt = 320 us,
- maksymalny okres przerwań zegarowych - TDmax = 81,92 ms,
- maksymalna częstotliwoć impulsów na T1, zliczanych w trybie licznika - fCNTmax
= 33kHz.
Zegar systemowy, cykl rozkazowy
Na cykl maszynowy składa się 10 stanów, które trwajš po trzy takty zegara każdy. Cykl jest więc wykonywany w cišgu 30 taktów. Minimalny czas cyklu tcy jest równy 8,38 us (przy fxtal = 3,58 MHz). Na wyjciu ALE jest wytwarzany sygnał zegarowy o częstotliwoci fxtal/30, wyznaczajšcy cykle maszynowe.
Inicjowanie systemu
Specjalne tryby pracy
| RESET | PROG | T1 | Tryb | Opis |
|---|---|---|---|---|
| 5V | x | x | Inicjowanie mikroprocesora | |
| 0V | x | x | Normalna praca | |
| 15V | 15V | 0,5,0V | 1a | W każdym cyklu zawartoć komórek wewnętrznej pamięci programu jest wysyłana do P0, kolejno po każdym opadajšcym zboczu ALE. |
| 15V | 15V | x | 1b | Po każdym narastajšcym zboczu T1 zwiększa się licznik rozkazow..Zawartoć wskazanej przez niego komórki pamięci programu jest wywyłana do P0. |
| 0V | 15V | x | 2 | Układ pracuje z zewnętrznš pamięciš programu (jedna strona) poprzez P0. Sygnał ALE jest strobem wysłania adre4su i wczytania danych. |
| 15V | x | x | 3 | Układ przyjmuje kody poprzez P1. możliwe jest testowanie portu P0 i ekspandera 8243. |
Lista rozkazów
| Przeslania | Rejestry i znaczniki | Skoki | Wejcie-wyjcie | Rozkazy sterujšce |
|---|---|---|---|---|
| MOV A,PSW | DEC Rr | JT0 adr | ANL Pp,#n | EN I |
| MOV PSW,A | CLR F0 | JNT0 adr | ORL Pp,#n | DIS I |
| MOVX A,@Ri | CPL F0 | JF0 adr | INS A,BUS* | EN TCNT1 |
| MOVX @Ri,A | CLR F1 | JF1 adr | ANL OUTL BUS,A* | DIS TCNT1 |
| MOVP3 A,@A | CPL F1 | JNI adr | ANL BUS,#n | SEL RB0 |
| Podprogramy | JBb adr | ORL BUS,#n | SEL RB1 | |
| RETR | SEL MB0 | |||
| SEL MB1 | ||||
| ENT0 CLK |